Equipe do câmpus Camaquã desenvolve robô com uma missão muito especial: resgatar vidas em situações de perigo
Projeto une estudantes, técnicos e professores na criação de um robô autônomo para missões de busca e salvamento. Equipe participou recentemente de um evento mundial e se prepara para competição brasileira
Imagine um robô capaz de percorrer sozinho corredores instáveis, localizar vítimas em situação de perigo e indicar sua posição com precisão. E não é que, aqui no IFSul, no câmpus Camaquã, temos uma equipe formada por professores, técnicos administrativos e estudantes totalmente focada nessa proposta? Um grupo que, aos poucos, está se aprimorando e expondo suas ideias tanto para o Brasil quanto para o mundo.
Inspirado em situações reais de catástrofes, como desabamentos e terremotos, o robô desenvolvido no IFSul simula uma missão de busca e resgate em um ambiente hostil. A ideia é que o robô seja capaz de navegar autonomamente por um labirinto, identificar vítimas simuladas e informar com precisão sua localização. Detalhe: tudo isso sem qualquer intervenção humana.
Estamos falando da equipe Graxaim Bots, que reúne cursos técnicos e superiores do câmpus, entre eles, o técnico em Automação Industrial, Informática e Eletrotécnica, além do superior em Análise e Desenvolvimento de Sistemas. O que eles estão fazendo é o que vamos te contar a partir de agora:
Como tudo começou e participação em eventos
Alguns acontecimentos foram fundamentais para que o trabalho atual se consolidasse. O professor Marcelo Schiller de Azevedo, um dos pioneiros em robótica educacional do câmpus, relata que essa conquista é resultado de mais de uma década de dedicação:
“Tudo começou com um projeto de extensão chamado RobotIF - Motivando o aprendizado através da robótica”, relembra. Segundo Marcelo, entre 2011 e 2015, o projeto alcançou mais de dois mil alunos do ensino fundamental em 25 escolas da região. A iniciativa levou a robótica para dentro de salas de aula e também despertou o interesse por competições.
Em 2012, foi criada a MOSTRAROB, primeira competição de robótica do IFSul, promovida pelo câmpus Pelotas. “Nas primeiras edições, só participavam Pelotas e Camaquã”, conta o professor. Um ano depois, o próprio câmpus Camaquã lançou sua competição local, também chamada RobotIF, que chega à 10ª edição em 2025.
A partir daí, os estudantes passaram a mirar competições de maior envergadura, como a Olimpíada Brasileira de Robótica (OBR), na categoria prática. Em 2017, o câmpus apoiou a ida da equipe para conhecer, pela primeira vez, a Competição Brasileira de Robótica (CBR), que naquele ano foi realizada em Curitiba (PR). “A experiência foi transformadora. A partir dela, estabeleci contato com organizadores e, em 2018, fui convidado a coordenar uma das categorias da RoboCup Brasil”, relata Marcelo. A partir dessa aproximação, novas portas se abriram.

Já em 2019, o câmpus formou sua primeira equipe de nível superior, participando da competição em Rio Grande (RS) e conquistando o 4º lugar na categoria Standard Educational Kits (SEK), mesma colocação obtida em 2022, em São Paulo.
Mas foi em 2023 que um plano mais ambicioso começou a se delinear. Sabendo que o Campeonato Mundial de 2025 ocorreria em Salvador (BA) e que as equipes campeãs nacionais garantiriam vaga no mundial, Marcelo propôs a formação de uma equipe de nível médio para disputar a competição em uma nova categoria: Rescue Maze. A escolha foi estratégica.
“Convidamos alunos que se destacavam na área e, com apoio da Reitoria e da Direção-Geral do câmpus, levamos quatro estudantes e um professor a Goiânia (GO). Foi nossa primeira participação nessa modalidade e conseguimos um excelente 6º lugar”, relata.
Esse desempenho chamou a atenção da organização do evento, e a equipe recebeu um convite para competir na RoboCup Américas, nos Estados Unidos, em abril de 2025. A viagem, no entanto, acabou inviabilizada pelos altos custos e pelo curto prazo para captação de recursos.
Apesar da frustração momentânea, a equipe seguiu motivada. “Logo no início do ano letivo de 2025, já estávamos reunidos e planejando nossa participação na Competição Brasileira de Robótica (CBR) deste ano”, conta Marcelo. O grupo estabeleceu um cronograma rigoroso de desenvolvimento e programação do robô.
Um convite inesperado: participar de um evento mundial
![]() O que ninguém esperava era o que viria a seguir: no dia 31 de maio, Marcelo recebeu uma ligação surpreendente. Eles foram convidados a participar da Competição Mundial de Robótica (RoboCup) 2025, em Salvador, na Bahia. A notícia pegou todos de surpresa. O tempo era curto, os desafios técnicos enormes, mas a vontade de representar o câmpus e o país falou mais alto.
O que ninguém esperava era o que viria a seguir: no dia 31 de maio, Marcelo recebeu uma ligação surpreendente. Eles foram convidados a participar da Competição Mundial de Robótica (RoboCup) 2025, em Salvador, na Bahia. A notícia pegou todos de surpresa. O tempo era curto, os desafios técnicos enormes, mas a vontade de representar o câmpus e o país falou mais alto.
Graças ao empenho da equipe e ao apoio de gestores, os recursos foram viabilizados e, em julho, o sonho virou realidade. Pela primeira vez, o câmpus Camaquã esteve entre os representantes brasileiros no maior evento de robótica do mundo.
“A simples participação já é uma vitória. Ver nossos alunos interagindo com equipes internacionais, apresentando soluções e aprendendo com os melhores é algo que não tem preço. Essa experiência vai marcar a vida de todos nós”, afirma o professor Marcelo, orgulhoso.

Agora, conforme previsto, o próximo desafio já tem data e local: de 13 a 19 de outubro, a equipe volta a competir na CBR, em Vitória (ES).
Como funciona o robô desenvolvido com a missão de salvar vidas?
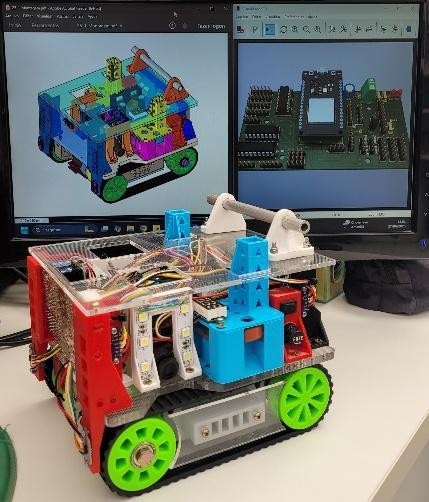
O professor explica que o projeto segue diretrizes específicas e, a partir delas, a equipe define a estrutura física do robô, escolhe os componentes eletrônicos e inicia a etapa de programação. “O robô deve seguir as diretrizes estabelecidas pela RoboCup Federation, entidade responsável pela formulação das regras e definição dos desafios da competição”, afirma. Segundo ele, com o projeto estruturado, começam os testes práticos.
Para a competição mundial, a equipe precisou lidar com um prazo apertado e optou por trabalhar com os recursos disponíveis. A mobilidade do robô é garantida por dois motores com redução e encoder acoplados, responsáveis por movimentar duas esteiras.

No que diz respeito à percepção do ambiente, o robô conta com um conjunto de sensores sofisticados. “Adotamos acelerômetro e giroscópio para controle de orientação, além de sensores infravermelhos de distância e sensor de cor para detecção de objetos e navegação”, detalha Marcelo. Um dos maiores desafios está na etapa de visão computacional: para isso, foram utilizadas duas câmeras OpenMV H7 Plus, importadas dos Estados Unidos. “Cada câmera teve um custo aproximado de R\$ 1.000,00 - valor que conseguimos viabilizar graças a doações de empresas parceiras do projeto”, complementa.
Já o professor Ricardo Prediger ressalta que o funcionamento do robô depende de sua capacidade de perceber o ambiente ao redor e responder de forma inteligente. “O robô funciona com base na sua capacidade de perceber e interagir com o ambiente ao redor. Para isso, ele utiliza sensores que atuam como ‘sentidos’”, afirma. Ele explica que sensores infravermelhos laterais detectam obstáculos, enquanto um sensor de cor voltado para o chão ajuda na navegação. As câmeras, por sua vez, fazem o reconhecimento de imagens e marcações visuais.
Na etapa de ação, os atuadores permitem que o robô execute tarefas práticas. “Ele conta com motores para se locomover e um mecanismo desenvolvido por nossa equipe para liberar ‘medicamentos’, atendendo aos requisitos específicos do desafio proposto”, explica Ricardo.
A inteligência do sistema está concentrada na programação do microcontrolador ESP32, que gerencia os dados captados pelos sensores e comanda os atuadores. “É necessário programar o microcontrolador com precisão, uma tarefa que exige bastante conhecimento, tempo e muitos testes”, destaca Ricardo. Para ele, a integração entre percepção e ação é uma das partes mais complexas de todo o desenvolvimento.
O ambiente simulado da competição representa um prédio em ruínas, com obstáculos, rampas, salas e corredores, além de diferentes texturas e desníveis. Durante a prova, o robô precisa reconhecer símbolos representando vítimas, como as letras "H", "U" e "S" ou quadrados coloridos, e, a partir disso, emitir alertas ou acionar mecanismos de resgate, conforme exigido pelo desafio.
Adaptações do projeto
O grupo explica que está sempre aprendendo novas estratégias, sensores, atuadores e sistemas mecânicos diferentes e melhores.
“Assim, a cada nova competição, a gente acaba desenvolvendo um novo robô. Portanto, o robô de 2024 foi totalmente reformulado para a competição do Mundial de 2025 e, com certeza, será melhorado para a CBR em outubro”, prevê Marcelo.
A equipe conta com uma divisão clara de tarefas. Na parte mecânica, Marcelo orienta os alunos Bernardo Luis Longaray Bülow e Vítor Maziero Oliveira, que modelam as peças em softwares técnicos e as fabricam com impressoras 3D e corte a laser. Já a placa eletrônica, coração do controle do robô, é desenvolvida sob a orientação do professor Ricardo, com auxílio dos estudantes Vítor e João Vítor Holz Knapp.
Na programação da visão computacional, os técnicos Endriw Duarte da Silva e Goianaz Maximilla dos Santos, junto aos professores Luciano Rocha e Vinícius Alves Hax, guiam os alunos Gabriela Hoppe Garcia, Thiago Miritz Amaral e outros para detectar cores e símbolos que representam vítimas. “Programar o robô para funcionar de forma coordenada é um desafio enorme, mas é também a parte mais gratificante”, diz Gabriela.
Desafios e aprendizados
Integrar todas essas etapas em um sistema funcional foi o maior desafio para a equipe. Gabriela conta que “os conflitos de código e a integração do hardware com o software eram as maiores barreiras”. Já Vítor reforça que “ter um conhecimento geral sobre todas as partes do robô ajuda a identificar e resolver os problemas de forma mais rápida e eficiente”.
O professor Marcelo recorda que o convite surpresa para o Mundial de Robótica foi um grande desafio, que mobilizou toda a equipe: “precisávamos montar um robô competitivo rapidamente. Foi uma pressão grande, mas nos uniu ainda mais”.
Experiência internacional e troca de conhecimentos
Participar do Mundial foi uma experiência transformadora para todos. “Estar lado a lado com equipes de diferentes países, aprender com suas técnicas e trocar ideias foi enriquecedor”, relata Marcelo. A equipe até participou de um desafio cooperativo com a equipe Fuzion Zero, da Nova Zelândia, em que os robôs trabalharam juntos para cumprir tarefas.

Vítor ressalta que, apesar das dificuldades, a equipe está preparada para competições internacionais. “Competir em nível mundial não é um sonho distante para nós. Temos conhecimento e vontade, só precisamos aprimorar a experiência que outras equipes já possuem”.
Impacto social e futuro do projeto
Além da competição, o robô tem um propósito social claro. Gabriela acredita que ele pode “salvar vidas em ambientes perigosos, onde o acesso humano é difícil, como incêndios ou desmoronamentos, entregando kits médicos e sinalizando a localização das vítimas”.
Para levar o projeto para o mercado e situações reais, seria necessário ampliar o tamanho do robô, usar materiais resistentes a ambientes hostis e componentes eletrônicos de alta qualidade, explica Vítor. “Ainda não tivemos recursos para isso, mas sonhamos em tornar o projeto uma solução comercial que ajude socorristas”.
Vida acadêmica e motivações pessoais
O projeto também transformou a vida dos estudantes. Gabriela destaca que a participação aumentou sua sede por conhecimento e incentivou a pesquisa. “O que aprendemos aqui vai muito além da sala de aula”. Para Vítor, a experiência trouxe motivação e sentido ao seu percurso. “Descobri uma paixão pela tecnologia e inovação que eu nem imaginava”. Bernardo reforça que a vivência no projeto fortaleceu seu desejo de seguir carreira na área.
Apoio e perspectivas
Apesar das conquistas, a equipe enfrenta desafios para manter o projeto. “O custo de componentes, inscrições e viagens é alto, e muitos alunos não têm como arcar com essas despesas”, explica Vítor. Eles destacam a importância do apoio financeiro para garantir que mais estudantes possam participar, sem precisar se preocupar com custos externos.
O professor Ricardo conclui que, além dos resultados nas competições, o projeto mostra a força da interdisciplinaridade e a capacidade do IFSul em desenvolver inovação, mesmo com recursos limitados. “Queremos inspirar outros estudantes e mostrar que é possível transformar a realidade com tecnologia”.
Um sonho em construção
Perguntados sobre o maior sonho com o projeto, Ricardo diz que “ser campeão brasileiro e voltar ao mundial com uma equipe ainda mais forte é um grande objetivo”. Mas ele ressalta que o valor maior está na união de diferentes saberes e no impacto na comunidade.
Gabriela expressa o sentimento que domina a equipe: “Participar dessas competições é um reconhecimento do nosso esforço e um estímulo para continuar crescendo. A robótica nos desafia a encontrar novas soluções, nos faz querer aprender mais”. Vítor finaliza com emoção: “Esse projeto não é um ponto final, mas um começo. Ele mostra que, com dedicação, qualquer um pode fazer a diferença e alcançar o que parecia impossível”.
Redes Sociais